This project was designed to be a demo of calculus’ use in control systems for AP Calculus in High School.
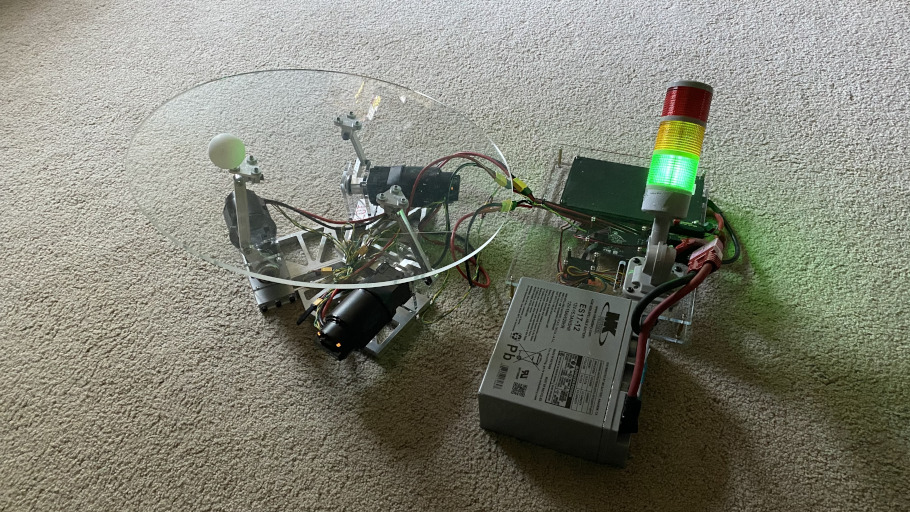
The first major part is the robot itself. It is a custom designed 4-axis motorized table that was CNC milled out of aluminum by me. It was designed completely in Autodesk Inventor, with CAM done in HSMWorks. It also features a control system using some components from the FIRST Robotics ecosystem, a system I was familiar with at the time.
The software uses PID control with the motors to control the position of a ping pong ball on the table. The first layer of control comes from positioning the table directly, with each motor having it’s own PID controller to allow the table to hit a targeted 3D position with inverse kinematics. The next layer runs externally with either a human commanding the position of the table directly, or a computer using a camera to track the ping pong ball and using a physics-based algorithm to tell the robot positions to move to in order to keep the ping pong ball in a controlled position.
Overall, this project was a lot of fun, and the good demonstration of using calculus in PID loops gave me an A+ on my final!